هذا الذراع الربوتي المستوحى من الأوريغامي يمكنه حمل أشياء أثقل منه بكثير
صمم باحثون في معهد ماساتشوستس للتكنولوجيا وجامعة هارفارد روبوت مستوحى من اوريغامي. يمكنه رفع أشياء من أشكال مختلفة وأثقل بكثير من وزنه.
سيقدم الفريق مشروعهم في مايو المقبل خلال المؤتمر الدولي للروبوتات والأتمتة في مونتريال. اتبع الأعضاء إرشادات واضحة : تحسين قبضة الروبوتات ليتمكنوا من إمساك مختلف الأشياء. النتائج الأولى مشجعة. تمكن الذراع من رفع زجاجات من النبيذ ، العنب والبيض.
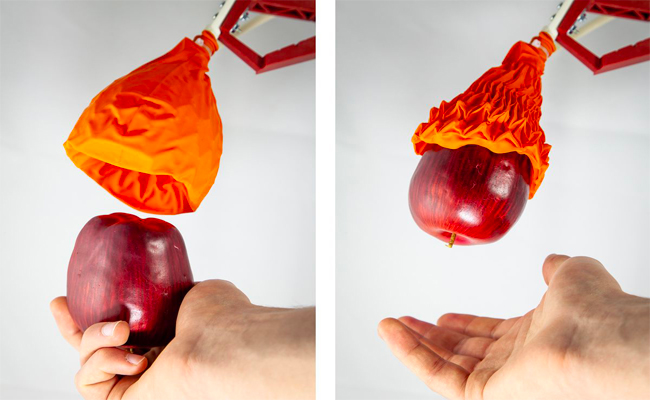
استلهم الباحثون من الأوريغامي ، فن طي الورق الذي يتميز بالقدرة على اتخاذ عدة أشكال والانتقال بينهم بغمضة عين. لتحقيق هذه النتيجة ، استعانت الفرق بملقط مخروطي مجوف. يتكون من هيكل من السيليكون مطبوع بتقنية 3D ومغطى بجلد سميك. يحيط بالشيء المراد إمساكه بدلاً من الضغط عليه.
يؤكد الباحثون على بساطة التصميم. يمكنهم بسرعة تصميم ملقط جديد حسب الحاجة. وأظهرت الاختبارات موثوقيته. تم تركيب الملقط على الروبوت ، وكان قادرًا على حمل الزجاجات والأكواب والعديد من الأشياء الأخرى. بعضها كان أكبر وثقيلا جدًا مقارنة بوزن الذراع!





